Для обеспечения возможности изменения
направления наблюдения в процессе исследования гибкие эндоскопы
имеют управляемый дистальный конец, который может изгибаться от
своего первоначального положения под некоторым углом (рисунок
74). В некоторых моделях угол изгиба может превышать 200°.
Рисунок 74 –
Положение дистального конца эндоскопа в процессе исследований:
а) исходное положение дистального конца эндоскопа; б) дистальный
конец эндоскопа изогнут вниз на 90°; в) дистальный конец эндоскопа
изогнут вверх на 180°
Необходимо обеспечить
плавную и легкую управляемость дистального конца эндоскопа (рисунок
75), в котором объединяются: объектив 1, регулярный жгут 2 для
передачи изображения, линза осветительного канала 3, осветительный
жгут 4, полимерная трубка 6 для подачи жидкости при очистке защитного
стекла объектива эндоскопа через форсунку 5 или воздуха для раздувания
исследуемой внутренней полости с целью расправления складок стенок
полости, гибкие сочленения 9, тонкие металлические тросы
управления 10, выполняющие роль тяг при изгибе дистального конца, помещенные
в гибкие металлические оболочки 11 – боудены
(спиральные пружины из проволоки, навитые вплотную). В операционных
эндоскопах предусмотрен канал 7 для введения хирургического инструмента
по полимерной трубке 8. Дистальный управляемый конец эндоскопа
крепится к тубусу.
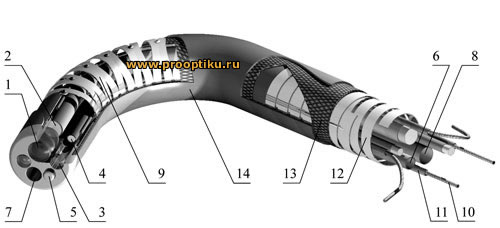
Рисунок 75 –
Дистальный конец гибкого эндоскопа
В настоящее время существует множество
вариантов гибких сочленений управляемой части эндоскопа, но наиболее
распространенной остается конструкция, представленная на рисунке
76 (называемая «раковой шейкой»).
Рисунок 76 –
Гибкие сочленения управляемой части эндоскопа типа «раковая шейка»
Кольца специальной формы 1 шарнирно
соединены между собой клепками 2 так, что получается подвижная
система, имеющая две степени свободы – изгибы в двух взаимно перпендикулярных
плоскостях. Управление изгибом осуществляется двумя парами тросов
3, которые пропущены сквозь гибкие металлические оболочки 4, припаянные
к последнему кольцу 8, а в пределах управляемой части – сквозь
кольца 5, припаянные с внутренней стороны к кольцам 1. С дистальной
стороны в точках 6 тросы припаяны к кольцу 7, к которому
крепится объектив эндоскопа.
Недостатком рассмотренной конструкции
является снижение надежности при эксплуатации, так как кольца
5, в которых протянуты управляющие изгибом тросы 3, чрезмерно
тонкие. Это приводит к тому, что управляющие тросы при натяжении
и загибании дистального конца перегибаются по резко ломаной линии,
что способствует быстрому перетиранию
как самих колец, так и тросов в процессе эксплуатации. Недостатком
данной конструкции является и наличие клепок 2, образующих шарнирное
соединение звеньев, что значительно усложняет саму конструкцию
и соответственно усложняет сборку этого механизма при изготовлении.
Для повышения надежности при эксплуатации
и упрощения конструкции в работе [50]
предложено гибкое сочленение для эндоскопа, представленное на
рисунке 77.
Рисунок 77 –
Гибкие сочленения управляемой части эндоскопа с плотно навитыми
пружинами
Конструкция гибкого сочленения
для управляемой дистальной части эндоскопа выполнена в виде каркаса
из колец 1, соединенных внутри между собой отрезками оболочек
тросов 2 и 3, выполненных в виде пружин с плотно навитыми витками,
внутри которых протянуты управляющие тяги-тросы 4, зафиксированные
одним концом 6 на первом кольце 7. При этом кольца соединены между
собой в шахматном порядке. Отрезки оболочек тросов одновременно
выполняют функции направляющих колец и шарнирных соединений ввиду
своей гибкости. В этом случае отпадает необходимость в клепках,
как в предыдущем варианте, достаточно того, что отрезки легко
изгибаются, в результате чего изгибается и вся конструкция гибкого
сочленения. К последнему кольцу 8 припаяны четыре боудена
5, сквозь которые пропущены тросы управления.
Для получения изгиба управляемой
части в одну из сторон при помощи любого механизма управления
(см. п. 4.2.2) осуществляют натяжение
одной из тяг-тросов 4 на некоторую величину. При этом группы наружных
колец 1 сближаются друг с другом, образуя профиль через изгибание
отрезков оболочек тросов 2 и 3. Таким образом, манипулируя натяжением
одного из тросов 4 или комбинируя натяжения пар тросов, можно
добиться изгиба управляемой части в любую сторону. Пружинно-кольцевая
структура конструкции позволяет всему механизму после прекращения
натяжения тросов автоматически возвращаться в исходное (прямое)
состояние, что удобно при эксплуатации.
Еще один из возможных вариантов
гибкого сочленения управляемой части эндоскопа рассмотрен в работе
[51] и представлен
на рисунке 78.
Рисунок 78 –
Гибкие сочленения управляемой части эндоскопа
Конструкция содержит основные
кольца 1 со сферической боковой поверхностью, в которых выполнены
отверстия для размещения тросов 3 управления и гибких упругих
связей 5 и дополнительные цилиндрические кольца 2, установленные
так, чтобы частично перекрывать внешнюю поверхность основных колец.
К последнему кольцу припаяны боудены
4, сквозь которые пропущены тросы управления.
Устройство работает следующим
образом. С помощью механизма управления натягивают на определенную
величину один из тросов 3. Так как данный трос управления закреплен
на первом основном кольце 6, то он кинематически
связан со вторым тросом управления, образуя так называемую управляющую
пару. Натяжение троса управления 3 вызывает деформацию упругих
связей 5, зафиксированных в основных кольцах 1. При этом дополнительные
кольца 2 скользят по сферической внешней поверхности основных
колец, и вся конструкция изгибается в направлении натяжения троса
управления. Таким образом, величина изгиба гибкой управляемой
части зависит от величины перемещения управляющих тросов 3 и конструктивных
особенностей основных 1 и дополнительных колец 2.
Рассмотренная конструкция не лишена
таких недостатков как сложность конструкции из-за наличия звеньев
двух типов, ограниченная надежность из-за использования
упругих звеньев, наличие остаточного крутящего момента.
Гибкое сочленение управляемой
части эндоскопа с повышенной продольной жесткостью и пониженным
остаточным моментом вращения предложено в работе [52]
и представлено на рисунке 79.
Рисунок 79 –
Гибкие сочленения управляемой части эндоскопа с кольцевыми элементами
чашеобразной формы
Гибкая управляемая часть эндоскопа
содержит кольцевые элементы 1 чашеобразной формы, установленные
с перекрытием внешней поверхности предыдущего элемента внутренней
поверхностью последующего элемента. На внешней поверхности элементов
1 нанесены кольцевые канавки для установки основания последующего
элемента. В кольцевом элементе выполнены четыре симметричных продолговатых
отверстия, управляющие тросы 2 закреплены в кольце 3 на дистальном
конце, пропущены через отверстия кольцевых элементов 1 и кольцо 5 на другом конце трубки. Управляющий
трос выполнен в виде ленты желобообразной
формы и установлен параллельно продольной оси конструкции выпуклостью
наружу. В кольце 5 закреплены торцы оплеток боудена
6. Управляющие тросы 2 проходят через эти оплетки к тягам механизма
управления.